Research Area



CoDeF
System-level design platform for advanced mobility
CoDeF (Comprehensive Design Framework for Advanced Mobility) is a user-centric system-level design platform developed for next-generation aviation systems and a wide range of unmanned mobility systems. The framework systematically supports the entire design process—from identifying customer needs to integrated system analysis and optimization—enabling users to effectively conduct design tasks through an intuitive interface and a rich set of templates and examples.
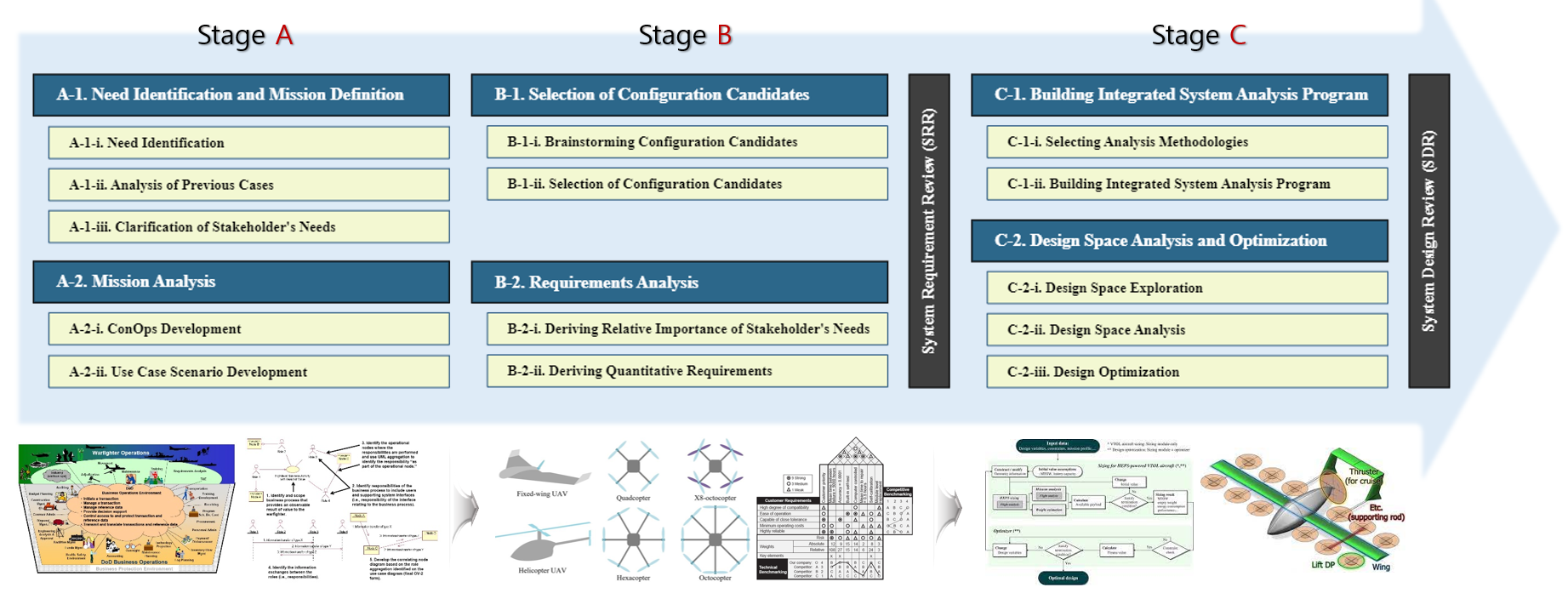
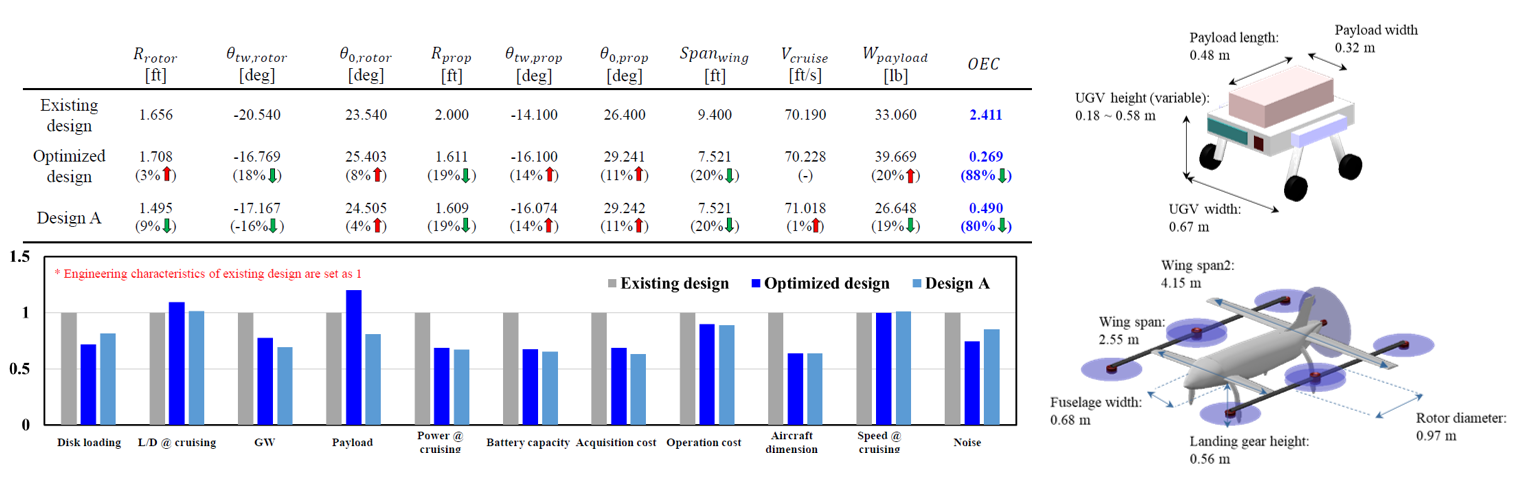
A key capability of CoDeF lies in its support for designing complex collaborative systems, particularly cooperative UAV-UGV operations. In such systems, unmanned aerial and ground vehicles work together to accomplish a shared mission, such as urban delivery. CoDeF provides dedicated processes for modeling operational scenarios, defining shared modules (e.g., interchangeable payloads between UAVs and UGVs), and analyzing interaction constraints. It guides users through developing detailed Concepts of Operations (ConOps), use case scenarios, and mission profiles, enabling a precise and efficient integration of heterogeneous systems. By facilitating the design of both individual vehicles and their cooperative behaviors in parallel, CoDeF ensures a comprehensive and optimized system architecture for real-world multi-vehicle applications.
Reference
[1] Kim, J., Kim, H., Kim, Y., Kwon, K., & Yee, K. (2024). A System-Level Design Framework for Collaborative Unmanned Vehicles–Part I. Design Process. In AIAA AVIATION FORUM AND ASCEND 2024 (p. 4220).
[2] Kim, H., Kim, J., Kim, Y., Lee, I., & Yee, K. (2024). A System-Level Design Framework for Collaborative Unmanned Vehicles-Part. II Application to Collaborative UAV-UGV. In AIAA AVIATION FORUM AND ASCEND 2024 (p. 4221).